menu


 協調領域の技術を共に磨く
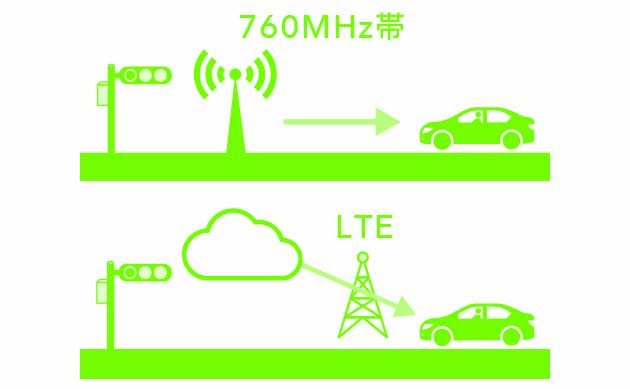
協調領域の技術を共に磨く 市街地向けの自動運転では車載のセンサ(LiDAR、ミリ波レーダ、カメラ、GPSなど)を用いて周囲の状況に応じた認知・判断を行います。様々な道路環境に対応した自動運転技術を実現するためには車載されたAIによる高度な認知・判断機能に加えて、それを支援する道路・通信設備などのインフラとの連携が必要となります。そこで、高度な自動運転システムを開発して市街地環境での実証実験を実施することでインフラによる支援が必要な状況を明らかにすることを目指しています。



東京臨海部実証実験におけるV2I/V2N/カメラの認識距離の検証例(テレコムセンター前交差点通過時の事例)

東京臨海部での実証実験の様子
(2019年9月から2022年12月までに244日間、3970kmの自動運転走行を実施)

V2I通信の信号先読み情報を活用したジレンマゾーンの急減速抑制

大型トラックによる信号機の遮蔽の様子

逆光により飽和した信号機の様子

隠蔽

背景同化

夜間

逆光




シミュレータを活用した不調シーンの再現例
(左:実画像、右:生成画像)

シミュレータで再現した雨天時の走行画像の様子

AD-URABAN Open Image Dataset v1の画像例
(交差点走行で視認性の低下するシーンの画像データセット)
自動運転技術の社会実装には、自動運転技術の安全性を網羅的効率的に評価する枠組みの早期構築が必要となります。
このため実道での評価に加え、仮想環境を用いた評価を行い、どのように安全性の高さを一般社会に対して訴求していくかが重要な課題になると考えます。