menu


 協調領域の技術を共に磨く
協調領域の技術を共に磨く 自律型自動運転システムに通信を用いて得た情報を加えることで高度な自動運転を実現するものです。

協調型自動運転に用いる交通環境情報は、高精度3次元地図情報に、時間と共に変化する動的な交通環境が紐づけられたデータです。
この情報は自動運転だけでなく、高度安全運転支援システムやすべての交通参加者にとっても有用な情報として活用されます。

SIP自動運転では、高度な自動運転の実現に向けて、「交通環境情報構築と活用ロードマップ」を策定し、第1期から研究開発および、実証実験を通じて標準化・実用化に取り組みました。

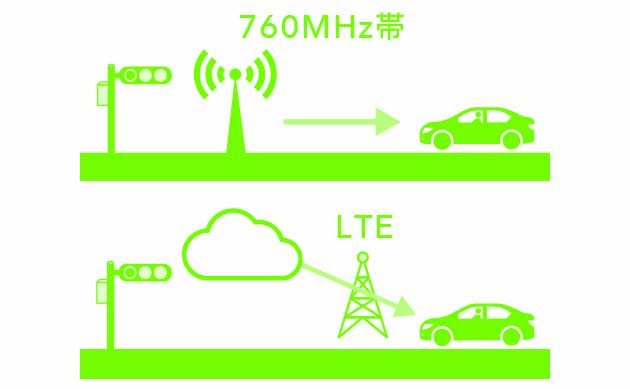
通信の方式はV2I、V2N、V2Vと呼ばれるものがあります。それぞれに特徴があり、SIP自動運転では配信する交通環境情報に応じて通信方式を選択して実証実験を行いました。